Тахометр - это полезный инструмент для подсчета RPM (оборотов в минуту) колеса или всего, что крутится. Самый простой способ сделать тахометр - это использовать ИК передатчик и приемник. Когда связь между ними прерывается, вы знаете, что что-то вращается и можете применять код для вычисления RPM, ориентируясь на частоту прерывания связи.
В этой статье мы рассмотрим, как использовать ИК-передатчик и приемник для изготовления тахометра с применением Arduino. Результат отображается на ЖК-дисплее 16х2.
Целью данного проекта является создание системы с одним входом и одним выходом. На входе устройства присутствует сигнал, изменяющийся с высокого (+5В) на низкий (+0В) уровень при нарушении связи. Согласно этому сигналу, Arduino будет увеличивать значение внутреннего счетчика. Потом проводится дополнительная обработка и расчет, и по прерыванию триггера на ЖК-дисплей будет выводиться рассчитанное RPM.
Для связи мы будем использовать ИК-луч от ИК-светодиода, включенного через низкоомный резистор так, чтобы светиться ярко. В качестве приёмника мы будем использовать фототранзистор, который при отсутствии света ИК-светодиода "закрывается". Компьютерный вентилятор будет размешен между ИК-передатчиком и приёмником и включен. ИК-приёмник включенный через транзисторную схему, будет генерировать прерывания. Для вывода результата будет использоваться Arduino LCD интерфейс, поэтому мы можем вывести окончательное значение RPM на ЖК-дисплей.
Элементы:
Arduino UNO
16x2 LCD
Макетная плата
Подстроечный резистор 5 кОм
Перемычки
SIP разъёмы
2x 2N2222 NPN транзистор
Инфракрасный светодиод
Фототранзистор
Резистор 10 Ом
Резистор 100 кОм
Резистор 15 кОм или 16 кОм
Компьютерный вентилятор
Подробный список элементов
Все элементы используемые в проекте указаны выше, но я более подробно опишу функции основных элементов.
Arduino UNO
Это плата Arduino, которую мы будем использовать для обработки импульсов от прерывания ИК-луча, которые сообщают о нахождении лопасти компьютерного вентилятора между приемником и датчиком. Arduino будет использовать эти импульсы наряду с таймером, чтобы вычислить RPM вентилятора.
ЖК-дисплей 16x2
После того, как Arduino вычислило RPM, эта значение будет отображаться на дисплее в понятном для пользователя виде.
Подстроечный резистор 5 кОм
Этот подстроечный резистор будет использоваться для регулировки контрастности ЖК-дисплея 16x2. Он дает аналоговое напряжение в диапазоне от 0 до +5В, позволяя настроить яркость ЖК-дисплея.
Инфракрасный светодиод и Фототранзистор
Фототранзистор открывается, когда мощный ИК-свет падает на него. Поэтому, когда ИК-светодиод горит, он держит фототранзистор открытым, но если ИК-светодиод закрывается например, лопастью вентилятора, то фототранзистор закрывается.
2N3904 и 2N3906
Эти транзисторы используются для преобразования уровня сигнала, с целью обеспечения выходных импульсов с фототранзистора для Arduino, в которых нет никаких напряжений кроме +0 и +5В.
Принципиальная схема
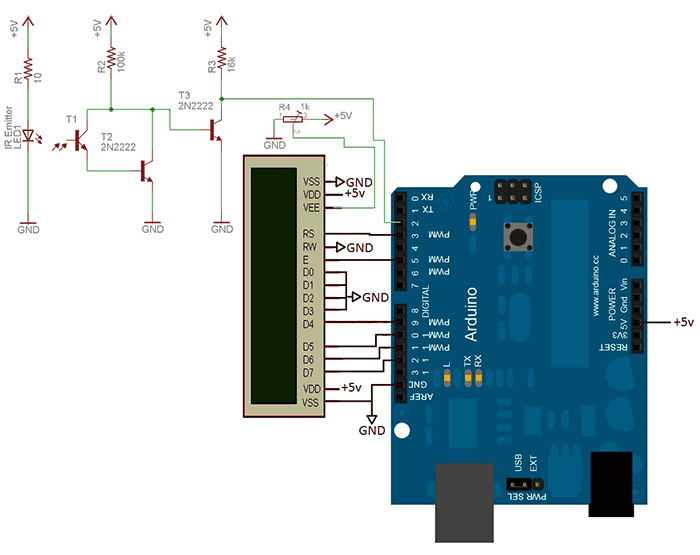
В схеме, интерфейс связи с ЖК-дисплеем упрощен и имеет только 2 линии управления и 4 линии передачи данных.
Особенности схемы
Интерфейс ЖК-дисплея 16x2
2 управляющих контакта и 4 для передачи данных подключены от Arduino к ЖК-дисплею. Это то, что указывает ЖК-дисплею, что и когда делать.
Схема обрыва ИК-луча
Сигнал обрыва ИК-луча идет на 2-ой цифровой контакт Arduino. Это прерывает Arduino, что позволяет ему засчитать импульс и позволяет тахометру получать данные.
Arduino LCD библиотека
Для этого проекта мы будем использовать Arduino LCD библиотеку. В основном мы будем просто обновлять значение RPM на второй строке на новое.
В качестве подготовки, посмотрите на код приведенный ниже, в котором при помощи этой библиотеки на ЖК-дисплей выводиться "Hello, World!" В тахометре мы будем использовать похожий код, особенно: "lcd.print(millis()/1000);".

Разберитесь в функциях этой ЖК-библиотеки как можно подробнее, прежде чем двигаться дальше. Она не слишком сложна и хорошо документирована на сайте Arduino .
Подсчет RPM при помощи Arduino
Так как мы собираемся подсчитать RPM компьютерного вентилятора, мы должны понимать, что для подсчета мы используем прерывание ИК-луча. Это очень удобно, но мы должны учитывать, что у компьютерного вентилятора 7 лопастей. Это значит, 7 прерываний равно 1 обороту.
Если мы будем отслеживать прерывания, мы должны знать, что каждое седьмое прерывание означает, что только что произошел 1 полный оборот. Если мы отследим время, необходимое для полного оборота, то мы легко вычислим RPM.
Время 1-го оборота = P * (µS/оборот)
RPM = кол-во оборотов/мин = 60 000 000 * (µS/мин) * (1/P) = (60 000 000 / P) * (кол-во оборотов/мин)
Для расчета RPM мы будем использовать формулу приведенную выше. Формула точная, и точность зависит от того, насколько хорошо Arduino сможет отслеживать время между прерываниями и посчитывать количество полных оборотов.
На фотографии ниже вы можете увидеть все необходимые детали и перемычки как на схеме.
Для начала подключается +5В и линии данных/управления ЖК-дисплея. Затем ЖК-дисплей, потенциометр контрастности и светодиод питания.
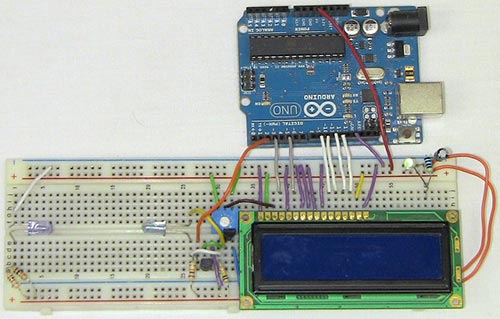
Схема обрыва ИК-луча собрана. Старайтесь, чтобы между ИК-светодиодом и фототранзистором было расстояние. На этой фотографии видно расстояние между ИК-светодиодом и фототранзистором, где я размещу компьютерный вентилятор.

Хватит разговоров о аппаратной части! Давайте начнем делать прошивку/программу, чтобы увидеть работу устройства!
Программная часть
Есть две основных части кода, которые показаны и подробно описаны ниже:
-Основной цикл обновления ЖК-дисплея
-Обновление времени прерываний
В основном цикле считаются обороты и обновления ЖК-дисплея. Поскольку основной цикл это гигантский while(1) цикл, то он будет работать всегда, RPM считаться, а ЖК-дисплей обновляться несколько раз в секунду. Функция в прерывании подсчитывает время между прерываниями ИК, поэтому считать RPM можно в основном цикле.
Помните, что компьютерный вентилятор имеет 7 лопастей, так что это тахометр предназначен для работы только с такими вентиляторами. Если ваш вентилятор или другое устройство дает только 4 импульса за оборот, измените в коде "(time*4)".
Два вентилятора работают на примерно 3000 оборотов в минуту и 2600 оборотов в минуту, с погрешностью около + / -100 оборотов в минуту.
Обзор тахометра на Arduino
Вентилятор генерирует импульсы прерывания, а на выходе мы видим RPM. Хотя точность не 100%, а примерно 95%, при стоимости элементов 10$ есть смысл построить этот тахометр на Arduino.
Что теперь делать?
Системы на основе обрыва луча полезны не только при измерении RPM, но и в качестве других датчиков. Например, вы хотите знать, открыта дверь или закрыта. Возможно, вы хотите знать, не проходило-ли что то под роботом. Есть много применений обрыва луча, а схема используемая тут настолько проста, что есть много путей для улучшения и сборки других удивительных устройств.
Заключение
В целом, я считаю этот проект успешным... Но дело во времени и опыте.. Так или иначе, система работает как задумывалось и достаточно надежно, а мы получили ожидаемый результат. Надеюсь, вам понравилось прочитать эту статью и узнать как сделать свой собственный тахометр на Arduino!
Список радиоэлементов
| Обозначение | Тип | Номинал | Количество | Примечание | Магазин | Мой блокнот |
|---|---|---|---|---|---|---|
| Плата Arduino | Arduino Uno | 1 | В блокнот | |||
| T2, T3 | Биполярный транзистор | 2N2222 | 2 | 2N3904 и 2N3906 | В блокнот | |
| R1 | Резистор | 10 Ом | 1 | В блокнот | ||
| R2 | Резистор | 100 кОм | 1 | В блокнот | ||
| R3 | Резистор | 16 кОм | 1 |
Нет, эта статья не об очередном способе обмануть этот злосчастный прибор. Здесь пойдет речь о том, как с помощью Arduino и среды LabView превратить свой счетчик электроэнергии в средство мониторинга потребляемой мощности или даже в амперметр!
Самый первый счетчик электроэнергии был индукционным. Принцип его работы до смешного прост - по сути это электродвигатель, ротором которого является алюминиевый диск, вращающий циферблат. Чем больше потребляемый ток- тем быстрее крутится диск. Устройство чисто аналоговое.

Однако сегодня индукционные счетчики сдают свои позиции, уступая место своим более дешевым электронным собратьям. И как раз один такой и станет подопытным:

Принцип работы не сильно изменился - в данном случае диск заменен электроникой, которая генерирует импульсы в соответствии с величиной потребляемой электроэнергии. Как правило, в большинстве приборов эти импульсы показывает светодиодный индикатор. Соответственно, чем быстрее мигает эта лампочка - тем больше сжигается драгоценных кВт.
Кроме того, на лицевой панели любого устройства есть передаточное соотношение счетчика А
- число импульсов на 1 кВт*ч. Как видно из фото, у подопытного А=12800. Из этой информации можно сделать следующие выводы:
С каждым импульсом счетчик фиксирует потребление, равное 1/12800 части от 1 кВт*ч. Если включить к счетчику нагрузку и начать просто считать импульсы, то потом легко получить потребленное ею количество электроэнергии (кВт*ч), разделив количество импульсов на передаточное соотношение.
Так как индикатор изменяет скорость своего моргания, то можно вывести зависимость между мощностью (кВт) и временем одного импульса счетчика, что позволит получить данные о мощности/токе.
Не будем загружать статью расчетами, но если нужно то
вот они
Воистину, передаточное число счетчика - великая вещь, так как зная ее можно выразить как мощность так и ток:
Составим пропорцию из нашего передаточного соотношения (А=12800 имп/кВт*ч) и неизвестного передаточного соотношения, которое будет при нагрузке X и за время одного единственного импульса (моргания лампочки):

Здесь X - неизвестная мощность, а t - время одного импульса. Выражаем отсюда неизвестную мощность и вот оно:

Ток считается с применением следующей пропорции передаточных соотношений и токов известных и неизвестных при нагрузке X.:

Что в общем-то приводит к идентичной формуле, но для тока (ток измеряется в Амперах а индексы означают нагрузку, при которой будет данный ток):

Тут можно заметить подводный камень - нужно знать ток при идеальной нагрузке в 1 кВт. Если необходима хорошая точность - лучше его измерить самостоятельно, а если нет- то приблизительно можно посчитать по формуле (напряжение и мощность известны), но будет более грубо, так как не учитывается коэффициент мощности.
Таким образом, все упирается в измерение времени одного импульса (моргания индикатора). В своих изысканиях я опирался на этот отличный проект . Некий итальянец сделал в среде Labview интерфейс для мониторинга мощности и придумал схему для измерения импульсов. Но в его проекте красовалась огромная недоработка - он подходил только лишь для счетчиков с передаточным соотношением 1000 имп/кВт*ч.

Верхний график - средняя мощность за 5 минут, нижний - в реальном времени. Интерфейс довольно гибкий и легко модифицируется под свои нужды. Если Вы еще не имели дела со средой LabView - рекомендую познакомиться.
Чтобы все заработало, оказалось достаточно внести один единственный блок в алгоритм программы, в соответствии с формулой выше.
Выглядит это следующим образом

Казалось бы просто, но до этого надо еще додуматься!
Итак, если Вы все-таки решите реализовать мониторинг мощности, то есть два варианта:
1. Ваш счетчик закрыт и запломбирован по самое не балуйся. А значит, считывать импульсы можно только с помощью фоторезистора, реагирующего на моргание лампочки. Его необходимо прикрепить синей изолентой напротив светодиодного индикатора на лицевой панели счетчика.
Схема будет выглядеть следующим образом:
Схема для бесконтактного снятия импульсов

Программа просто сравнивает значение сопротивления на фоторезисторе и потенциометре. Причем последний позволяет выставить чувствительность такого датчика во избежание ложного срабатывания и настроиться под яркость индикатора.
2. У Вас есть доступ к импульсному выходу счетчика. На многих моделях имеется импульсный выход, который дублирует мигания лапочки. Это сделано для того, чтобы была возможность подключать прибор к системе автоматизированного учета. Представляет собой транзистор, открывающийся при горящем индикаторе и закрывающийся при погасшем. Подключиться напрямую к нему не составляет труда - для этого потребуется всего один подтягивающий резистор. Однако прежде чем делать это, удостоверьтесь что это именно импульсный выход, а не что-либо иное! (в паспорте всегда есть схема)
Схема для подключения к телеметрическому выходу

В моем случае - доступ полный, поэтому заморачиваться я особо не стал. Устанавливаем LabView и вперед измерять! Все графики представляют собой мощность (Вт) в реальном времени.
Первым под раздачу попал многострадальный чайник. Крышечка гласит что мощность у него 2,2 кВт, однако судя по графику, исправно потребляет лишь 1700 Вт. Обратите внимание, что потребление более-менее постоянно во времени. Это означает что нагревательный элемент (скорее всего нихром) очень слабо изменяет свое сопротивление в течении всего процесса вскипячивания.

Совсем другое дело клеевой пистолет - заявленная мощность 20 Вт.Он ведет себя в соответствии с законами физики - при нагреве сопротивление нагревателя увеличивается, а ток соответственно уменьшается. Проверял мультиметром - все так и есть.

Старый радиоприемник «Весна». Здесь график ушел вверх в начале из-за того, что я запустил измерение во время импульса, соответственно это повлияло на данные. Горки на графике показывают, как я крутил ручку громкости. Чем громче - тем больше радио кушает.

Перфоратор с заявленной мощностью 700 Вт. Нажал на кнопку до упора, чуть чуть подождал и отпустил, но не плавно. На графике хорошо видно бросок тока при пуске двигателя. Именно поэтому моргает свет, когда добрый сосед начинает долбить свою любимую стену.

А теперь самое интересное. Я провел небольшой эксперимент со своим стареньким ноутбуком, результат которого приведен на картинке:

Оранжевой точкой отмечено время, когда я запустил сразу несколько «тяжелых» программ. Как видите, графики загрузки процессора и возросшее потребление имеют нечто общее между собой. Недавно была
- Tutorial
Задача на сегодня: как определить угол поворота инкрементального энкодера?
Сегодня в серии публикаций про ардуино головного мозга коротенькая статья с небольшим экспериментом и парой рецептов. В комментариях к одной из моих прошлых статей меня обвинили в том, что ардуиной подсчитывать импульсы энкодера - фу так делать:Оптически энкодер 1000/оборот и ATMega не имеющая аппаратной схемы работы с энкодером (как у серий STM32, например) - это тупик.Дальше в комментариях было много теоретизирования, которое лучше пропустить. Давайте лучше попробуем протестировать в железе, насколько это тупик. Для начала, что такое инкрементальный энкодер? Тот, кто помнит эпоху до-оптических мышек, ответ знает точно. Внутри энкодера есть диск с прорезями, вот для наглядности я сделал фотографию диска с пятьюстами прорезями:
С одной стороны этого диска помещают светодиод, с другой фотодиод:

Вращаясь, диск то пропускает свет на фотодиод (если прорезь напротив пары светодиод-фотодиод), то не пропускает. При постоянной скорости вращения на выходе фотодиода получается красивая синусоида (не забываем, что поток света может быть перекрыт частично). Если этот сигнал пропустить через компаратор, то получится сигнал прямоугольной формы. Подсчитывая количество импульсов сигнала, получим насколько провернулся вал датчика.
Как же определяется направление вращения? Очень просто: в датчике не одна, а две пары светодиод-фотодиод. Давайте нарисуем наш диск, точки A и B показывают положение фотодатчиков. При вращении вала энкодера снимаем два сигнала с этих фотодатчиков:

Датчики поставлены на таком расстоянии, чтобы при вращении с постоянной скоростью генерировался меандр, свинутый на четверть периода. Это означает, что когда фотодатчик А стоит напротив середины прорези, то фотодатчик B стоит ровно на границе прорези. Когда датчик крутится (условно) по часовой стрелке, то при восходящем фронте на сигнале B сигнал A равен единице. Когда же датчик крутится в обратную сторону, то при восходящем фронте на сигнале B а равен нулю.
Это всё прекрасно, но что мне копипейстить в мой проект?
Вот это:Volatile long angle = 0;
volatile char ABprev = 0;
const int increment = {0,-1,1,0, 1,0,0,-1, -1,0,0,1, 0,1,-1,0};
ISR (PCINT0_vect) { // D8 or D9 has changed
char AB = PINB & 3;
angle += increment;
ABprev = AB;
}
void setup() {
pinMode(8, INPUT); // A
pinMode(9, INPUT); // B
PCICR |= (1 << PCIE0); // interrupt will be fired on any change on pins d8 and d9
PCMSK0 |= 3;
ABprev = PINB & 3;
Serial.begin(115200);
}
void loop() {
Serial.println(angle);
delay(100);
}
Давайте объясню, как этот код работает. Я тестирую код на ATmega328p (Arduino nano), выходы энкодера поставлены на пины d8 и d9 arduino nano. В терминах ATmega328p это означает, что младшие два бита порта PINB дают текущее состояние энкодера. Функция ISR будет вызвана при любом изменении в этих двух битах. Внутри прерывания я сохраняю состояние энкодера в переменную AB:
Char AB = PINB & 3; // Внимание, ардуиновский digitalRead() противопоказан,
// когда нам критична скорость работы
Для чего? Давайте посмотрим на предыдущий график, в нём пунктирными линиями обозначены моменты вызова прерывания (любой фронт на любом сигнале). Для каждого вызова прерывания цифры внизу - это состояние переменной AB:

Видно, что при вращении по часовой стрелке переменная AB меняется с периодом в четыре значения: 23102310 2310. При вращении против часовой стрели переменная AB меняется 01320132 0132.
Если у нас оба фотодатчика были перекрыты (переменная AB=0), а при вызове прерывания AB становится равной 2, то датчик вращается по часовой стрелке, добавим к счётчику единицу. Если же AB переходит от 0 к 1, то датчик вращается против часовой стрелки, отнимем единицу от счётчика. То же самое и с другими изменениями переменной AB, давайте составим таблицу:

Обратите внимание, что таблица заполнена не до конца. Что вставить на месте вопросительных знаков? Например, по идее, главная диагональ таблицы не должна использоваться никогда, прерывание вызывается при изменении переменной AB, поэтому перехода 0->0 случаться не должно. Но жизнь штука тяжёлая, и если микроконтроллер занят, то он может пропустить несколько прерываний и таки вызваться. В таком случае предлагаю ничего не прибавлять и не отнимать, так как нам явно не хватает данных; заполним недостающие клетки нулями, вот наша таблица:
Const int increment = {0,-1,1,0, 1,0,0,-1, -1,0,0,1, 0,1,-1,0};
Теперь, надеюсь, код понятен полностью.
В итоге на один период сигнала A у нас вызывается четыре прерывания, что при вращении датчика в одну сторону увеличит счётчик не на 1, но на 4. То есть, если на инкрементальном энкодере написано 2000PPR (две тысячи прорезей на диске), то реальное его разрешение составляет 1/8000 оборота.
Постойте, а что с дребезгом?
Пропуская синусоиду через компаратор, мы неизбежно получим дребезг на фронтах нашего сигнала прямоугольной формы. Давайте возьмём лупу и посмотрим на один фронтов:
Сигнал A постоянный, поэтому согласно нашей табличке, на восходящем фронте сигнала B мы добавляем единицу, а на нисходящем вычитаем. В итоге, если мы сумеем отработать все фронты нашего дребезга, то наш алгоритм его прекрасно проглотит. И вот тут становится интересно, а сможет ли наша ардуинка отработать такие прелести? Теоретизировать можно долго, давайте ставить эксперимент.
От теории к практике
Считать импульсы будем тремя способами:- Софтверно на ATmega328p
- ATmega328p, опрашивающая хардверный счётчик
Подключение
Софтверный счётчик
Подключение простейшее, достаточно два провода от энкодера завести на ноги d8 и d9 ардуины.HCTL-2032
Подключение hctl-2032 к ардуине выглядит примерно вот так:
Чтобы не занимать все ноги ардуины, я поставил ещё 74hc165.
BeagleBone Blue

BeagleBone Blue имеет встроенный квадратурный декодер, поэтому 3.3В энкодеры можно просто завести на соответствующий коннектор. У меня энкодер имеет 5В логику, поэтому я добавил двусторонний преобразователь уровней на bss138 :

Эксперимент первый
Я взял свой стенд с маятником, который уже описывал :
Каретка ездить не будет, просто повешу три счётчика на энкодер маятника. Почему именно маятник? Потому что сила тяжести даёт неуплывающий маркер: каждый раз, как маятник успокаивается в нижем положении, счётчики должны показывать число, кратное 8000 (у меня энкодер 2000ppr).
Вот три счётчика, подключенные параллельно, сверху вниз: биглбон, софтверный счётчик, hctl2032. ШИМ-драйвер для двигателя каретки в данном тесте не используется:

Начало испытаний, маятник неподвижен, два монитора последовательных портов и счётчик биглбона, запущенный по ssh:

Рукой делаю один полный поворот маятника, жду, пока он снова успокоится в нижнем положении:

Все три счётчика показывают ровно 8000, как и положено! Хорошо, из комментариев мы вынесли, что из-за дребезга софтверный счётчик должен сильно ошибаться при низких скоростях маятника. Десять раз повторяю процедуру: качаю маятник так, чтобы он сделал один оборот, а затем жду, пока полностью успокоится. Затем снова качаю, жду, покуда успокоится. Трение низкое, одна итерация занимает пару минут, в итоге примерно полчаса работы счётчиков.

Ха, а ведь опять ни один не ошибся!
Эксперимент второй
Итак, дребезг в реальности оказался не столь страшным, как казалось. Снимаю маятник, и цепляю к оси энкодера шуруповёрт:
Дальше потихоньку увеличиваю обороты, периодически останавливаясь, и проверяя, насколько все три счётчика согласны с происходящим. Именно поэтому у меня в одном из окон есть оценка скорости вращения вала энкодера.
100 оборотов в минуту - порядок. 500 оборотов в минуту - порядок, согласие полное. 900 оборотов в минуту: АГА! Останавливаю шуруповёрт:

Хардверные счётчики по-прежнему согласны между собой, а вот софтверный прилично отстал. Давайте считать, насколько это согласуется с теорией. Мануал на ATmega328p говорит, что обработка (пустого) прерывания - это минимум 10 тактов микроконтроллера. Работа со стеком, чуть кода внутри прерывания - это в сумме тактов 40 на одно прерывание. 8000 тысяч прерываний на 900 оборотов в минуту (15 оборотов в секунду) на 40 тактов = 4800000 тактов в секунду. В целом наша оценка весьма недалека от тактовой частоты ардуины, то есть, 1000 оборотов в минуту - это потолок для счётчика энкодера высокого разрешения на прерываниях, причём для ардуины, которая не делает ничего другого.
На 2000 оборотов в минуту оба хардверных счётчика работали без рассогласований, а больше у меня шуруповёрт выдать не может.
Подведём итог:
1. Считать на прерываниях вполне можно, 15 оборотов в секунду - это всё же весьма приличная скорость. Но если нужно обрабатывать больше одного счётчика, всё становится резко хуже. Выбор энкодера играет сильную роль, так как в хороших энкодерах подавление дребезга есть внутри, поэтому хороший энкодер и копеечный 8-битный микроконтроллер - вполне себе решение.2. Хардверные счётчики надёжнее, но дороже.
3. hctl2032 существенно дешевле BeagleBone Blue, но и сложнее подключается к контроллеру, а биглбон и сам себе контроллер, и умеет четыре энкодера разом обрабатывать. Да и усилитель для двигателя там уже есть на борту, поэтому стенд с маятником можно собрать вообще малой кровью. С другой стороны, даже будучи довольно экзотичной, hctl-2032 стоит пять долларов за штуку, и может спасти ситуацию, когда схема с каким-нибудь пиком или атмелом уже есть, и сильно менять её не хочется.
4. Говорят, stm32 и дёшев, и имеет хардверный счётчик. Но цена вхождения (в смысле времени) в вопрос больно кусается.
В общем, как обычно, идеального решения нет, всё зависит от задачи и от доступных ресурсов.
Для дополнительного задания
Принципиальная схема
Схема на макетке

Обратите внимание
В этом эксперименте мы впервые используем микросхему, в данном случае - выходной сдвиговый регистр 74HC595. Микросхемы полезны тем, что позволяют решать определенную задачу, не собирая каждый раз стандартную схему.
Выходной сдвиговый регистр дает нам возможность «сэкономить» цифровые выходы, использовав всего 3 вместо 8. Каскад регистров позволил бы давать 16 и т.д. сигналов через те же три пина.
Перед использованием микросхемы нужно внимательно изучить схему ее подключения в datasheet’е . Для того, чтобы понять, откуда считать ножки микросхемы, на них с одной стороны есть полукруглая выемка. Если мы расположим нашу 74HC595 выемкой влево, то в нижнем ряду будут ножки 1-8, а в верхнем 16-9.
На принципиальной схеме нашего эксперимента ножки расположены в другом порядке, чтобы не вышло путаницы в соединениях. Назначения выводов согласно datasheet’у подписаны внутри изображения микросхемы, номера ножек - снаружи.
Напомним, что на изображении семисегментного индикатора подписаны номера его ножек и их соответствие сегментам.
Скетч
Для того, чтобы передать порцию данных, которые будут отправлены через сдвиговый регистр далее, нам нужно подать LOW на latch pin (вход ST cp микросхемы), затем передать данные, а затем отправить HIGH на latch pin, после чего на соответствующих выходах 74HC595 появится переданная комбинация высоких и низких уровней сигнала.
Для передачи данных мы использовали функцию shiftOut(dataPin, clockPin, bitOrder, value) . Функция ничего не возвращает, а в качестве параметров ей нужно сообщить
пин Arduino, который подключен ко входу DS микросхемы (data pin),
3
Не только вы можете сделать это без обработчика прерываний, вы можете сделать это с небольшим или отсутствующим программным обеспечением и справиться с более быстрыми импульсами, которые возможны при опросе программного обеспечения или подсчете прерываний.
Atmel AVR, что большинство Arduinos основаны на оборудовании счетчика/таймера, которое будет считать импульсным во входном штыре напрямую. Все, что вам нужно сделать, это настроить аппаратное обеспечение для работы счетчика и прочитать регистр счетчика. Существует небольшая сложность для 16-битных счетчиков на 8-битном устройстве, но это легко преодолеть. Arduino настраивает таймеры для операций PWM по умолчанию, но это можно переопределить, как описано (подробнее см. Руководство пользователя AVR) - вам нужно использовать таймер/счетчик в режиме CTC.
ARM на базе Arduninos и почти любой другой микроконтроллер будут иметь аналогичные аппаратные средства; некоторые из них обладают большей гибкостью, благодаря чему штыри могут использоваться для подсчета оборудования.
На AVR у вас есть 8 и 16-битные счетчики, если вам нужны большие счета, вам, возможно, придется обработать прерывание переполнения. Если вы будете регулярно проверять счетчик, вы сможете обрабатывать даже это без прерываний, имея возможность опроса со значительно меньшей и, возможно, апериодической скоростью, чем скорость входных импульсов, просто опросив флаг переполнения перед следующим переполнением.
В вашем случае вам, вероятно, необходимо прочитать количество импульсов в регулярный период, который меньше времени, в течение которого счетчик будет переполняться с максимальной ожидаемой частотой пульса. Так, например, если вы использовали 8-битный счетчик, а максимальная частота пульса составляла 1 кГц, вам нужно было бы опросить каждые 256/1000 секунд или меньше, но наибольшую точность можно получить, сделав этот период как можно дольше. Так, например, вы могли бы иметь что-то вроде следующего (это не реальный код, и только фрагмент):
For(;;) { delayMS(250) ; frequency = 4 * readCounter() ; }
Альтернатива, которая будет получить более линейную характеристику, но недетерминированное отсчет будет опрашивать переполнения и измерять время, затрачиваемое на подсчет фиксированного количества импульсов, и поэтому определяйте ваше измерение с момента времени для фиксированного счета, а не на счет в течение фиксированного времени.
For(;;) { int start = getMillisec() ; while(!counterOVF()) { // Do nothing (or something useful but quick) } int t = getMillisec() - start ; frequency = 256 * t/1000 ; }
0
Большое спасибо за ваш вопрос. Если я правильно понял, ваша первая идея состоит в том, чтобы отключить импульсы с помощью аппаратного обеспечения, а второй - все время, когда процессор занят. Проблема в том, что мой микроконтроллер полностью загружен (поэтому простой ISR, увеличивающий счетную переменную, не будет работать) и не может быть опросом, поскольку он должен выполнять другие задачи.Кроме того, у меня больше нет аппаратных счетчиков. Есть ли другие альтернативы? Я слышал, что это возможно, используя аналоговые порты (полагаясь на сходство с PWM). Большое спасибо - manatttta 28 авг. 14 2014-08-28 08:16:36
0
В обоих случаях счетчик аппаратных средств выполняет подсчет, во втором примере мой опрос проверяет флаг переполнения, но это просто для демонстрации принципа, это не фундаментальное решение; он может в равной степени быть обработчиком прерываний - преимущество состоит в том, что вы получаете одно прерывание для каждых 256 импульсов (при условии 8 бит счетчика), а не каждый импульс, поэтому накладные расходы прерывания намного ниже. - Clifford 28 авг. 14 2014-08-28 11:10:07
0
Вы можете использовать аналоговый вход, только если выход датчика представляет собой фиксированную частоту PWM (и вы добавили подходящую аналоговую фильтрацию с отсечкой несколько ниже этой частоты), но ваш вопрос подразумевает, что это переменная частота, а не PWM (иначе как подсчет импульсов поможет?). -